Matt Estrada

Research Scientist @ The AI Institute
Research
See Google Scholar for a complete list of publications.
Amphibious Field Robot

I was the maintainer continuing develpment of our k-rock 2 sprawling-gait quadruped robot, made up of 21 Dynamixel motors and controlled via an ODROID XU4 running Linux. I implemented a surface swimming gait on the robot via an undulating tail and spine. We are using simulation and laboratory experiments to predict what obstacles the robot can and cannot traverse.
Engineering work has involved layering ROS onto the C++ controller architecture and revamping our compilation procedure with CMake. I recruit and supervise projects, internships, and collaborations on the hardware.
- Robot controller repository
- Traversability estimation repo (IDSIA collaboration)
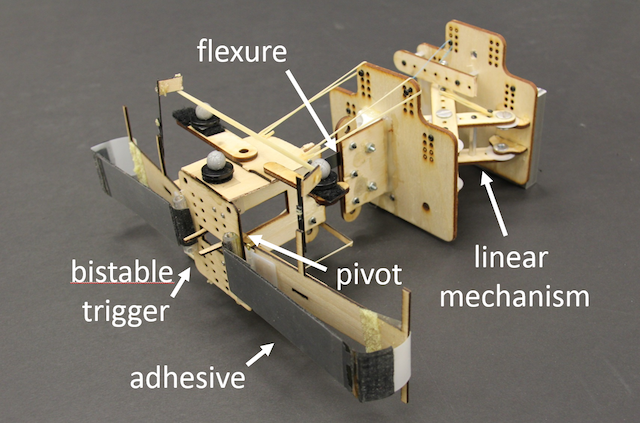
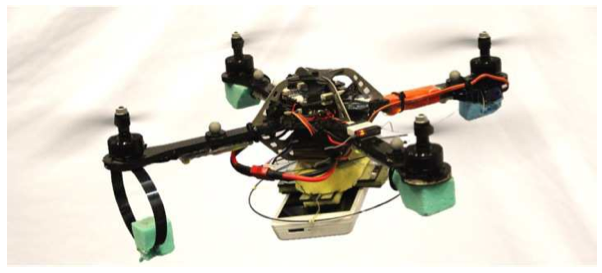
Flying, Tugging, Micro Air Vehicles
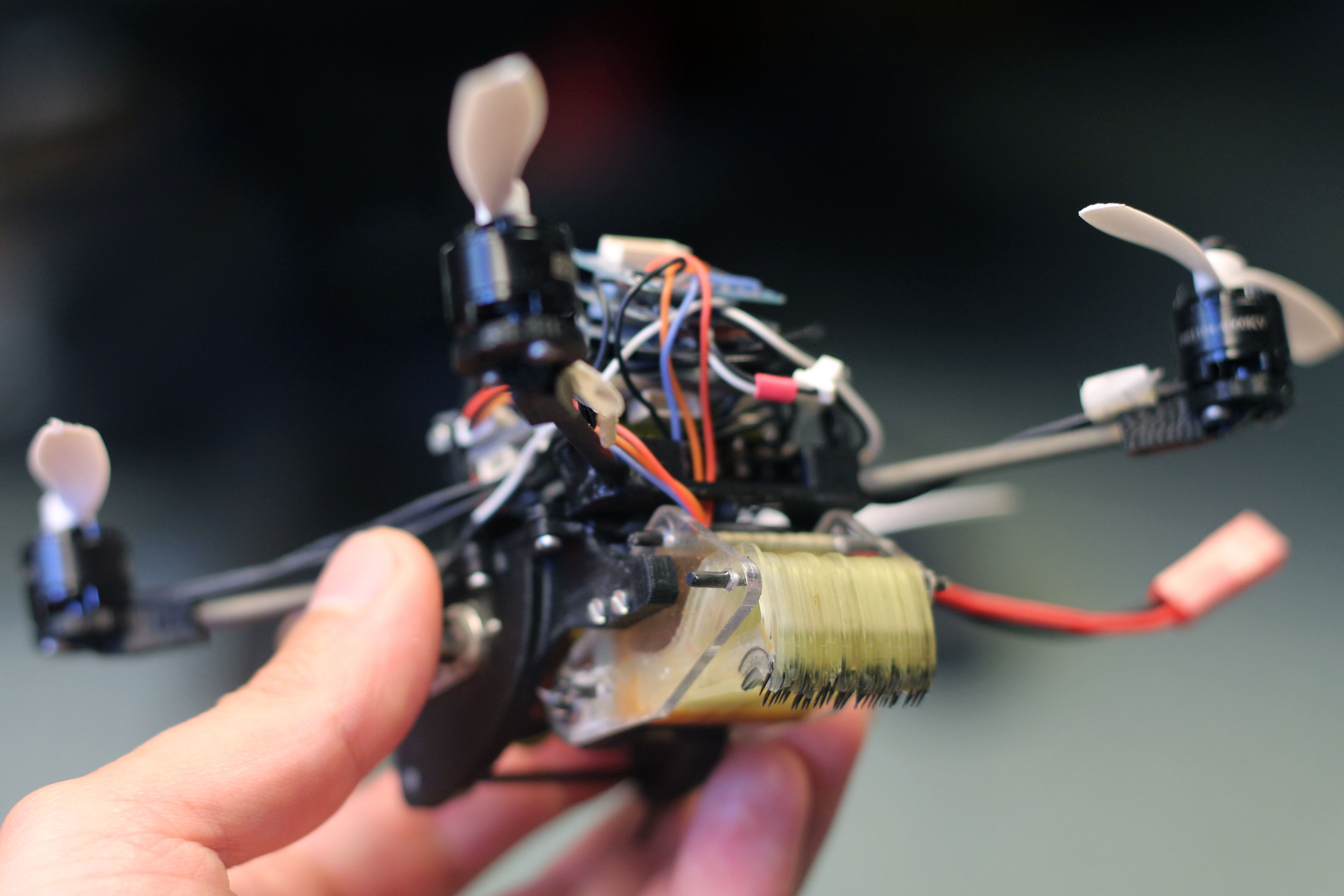
Work with the Laboratory of Intelligent Systems at EPFL during my PhD exchange under a Swiss scholarship and NSF GROW. We combined aerial locomotion with the ability to tug with high forces by attaching onto the environment with adhesives.
- Science Robotics Paper
- Stanford News
- MIT Technology Review
- Wired
- Science Magazine
- EPFL News
- AAAS Eureka Alert
- Publico (en español)
- IEEE Spectrum
- Design Engineering Magazine
- Discover Magazine Blog
NASA Free Flyer Gripper
Collaboration between the The Biomimetics and Dexterous Manipulation Lab and Autonomous Systems Lab on a NASA Early Stage Innovations grant. We were aiming to equip Assistive Free Flyers (AFFs), small robots on the International Space Station, with gecko-gripper appendages to aid astronauts.
My contribution focused on adapting a curved surface, gecko adhesive gripper for use on a free flyer table. Applications may entail grasping the surfaces of uncooperative objects, with some misalignment and relative velocity. To this end, we modeled force constraints of the gripper and dynamics while grasping translating, spinning objects. We experimentally verified the boundaries of successful grasp conditions on a 2D testbed.
Perching Micro Air Vehicles
I was part of our group enabling MAVs to perch and take a rest on vertical surfaces. With a typical mission life lasting on the order of 20 minutes, it is a welcome break for the MAV to collect data or recharge.
We designed gecko adhesive grippers that will stick to smooth, flat surfaces and collaborated with a controls group at UPenn to demonstrate perching under indoor motion capture.
- NYtimes “What You Get When You Blend a Drone and a Gecko”
- Video on our collaboration with Vijay Kumar’s group at UPenn
- BDML perching page
Sensing Footpad (MIT Undergraduate Research)
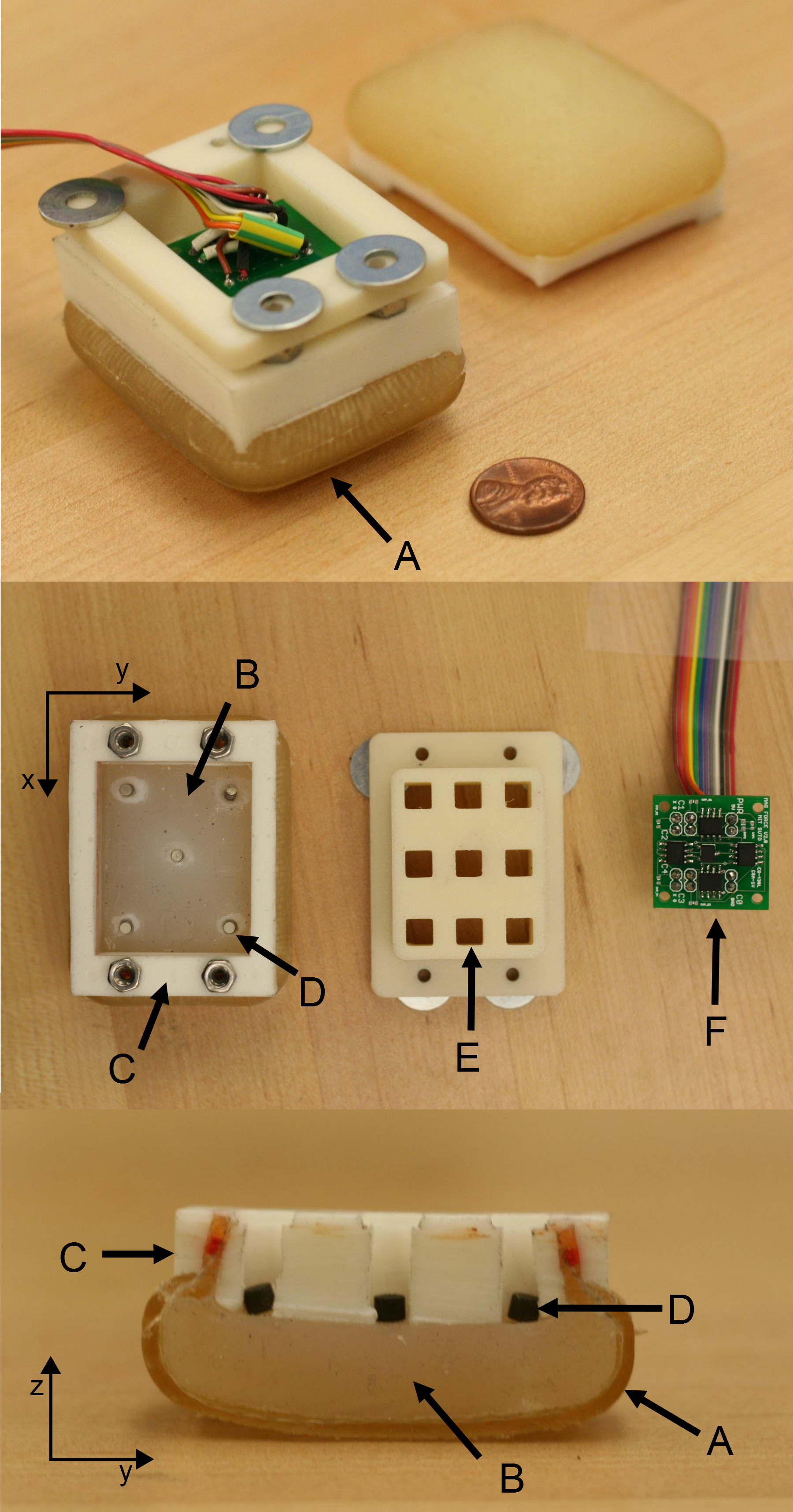
I designed and manufactured the structure of a soft force sensor for my senior thesis in the Biomimetics and Dexterous Manipulation Lab at MIT. I was supervised by (then) graduate student Michael Chuah, who implemented the signal processing and neural network to calibrate force readings. The force sensor was intended for use in the paw pad of the MIT Cheetah.
I used a series of 3D printed molds to cast a woven fiberglass cloth into a polyurethane film that encased a softer silicone. Hall effect sensors were mounted above magnets on the deformable pad and this deflection between these was correlated force.